Constraint Satisfaction
CSCI 4511/6511
Announcements
Homework 2 is due on 29 September at 11:55 PM
Fri 20 Sep Office Hours moved: 12 PM - 3 PM
Autograder
![]()
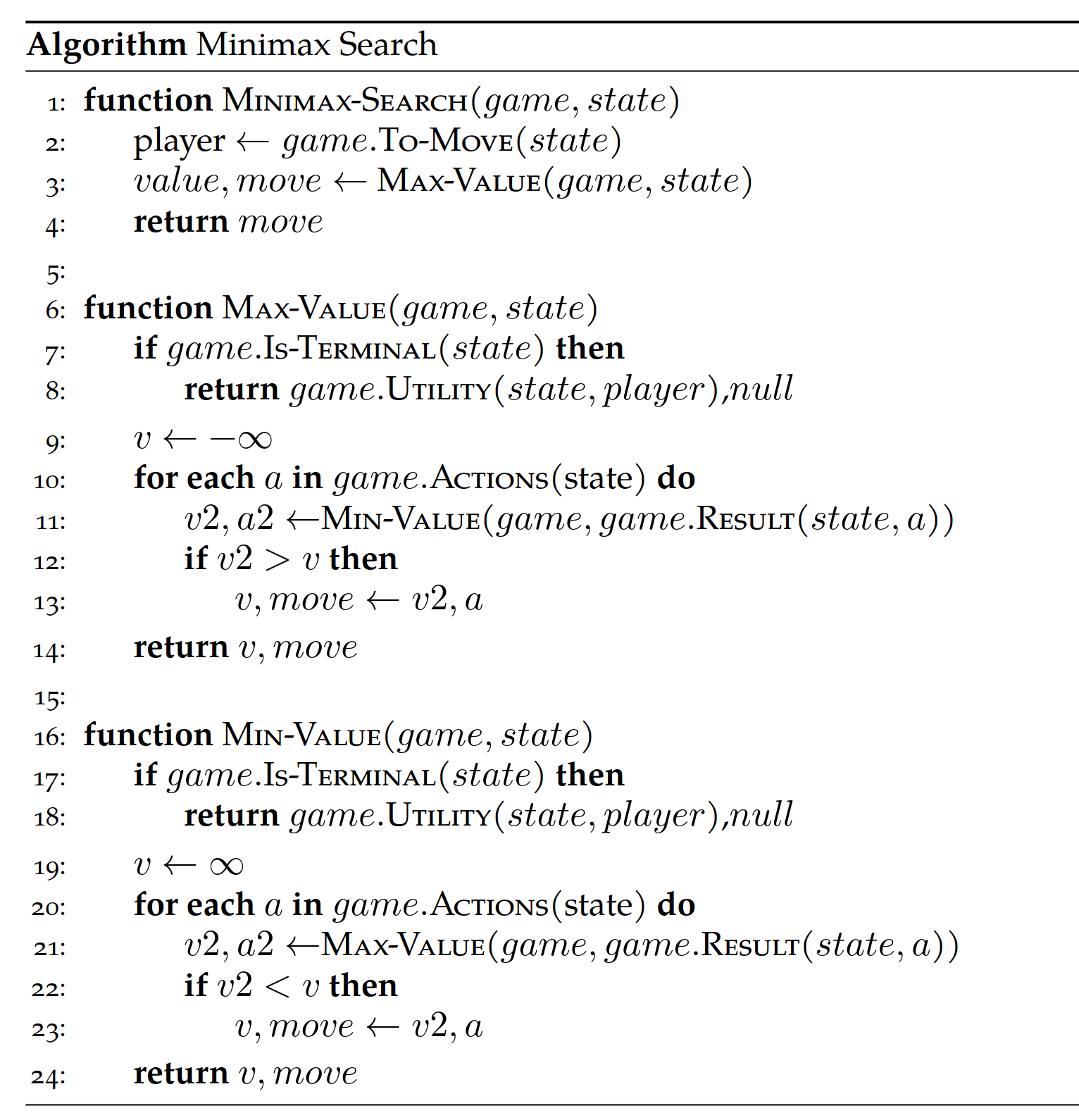
Minimax
Expectiminimax
- “Expected value” of next position
- How does this impact branching factor of the search?
🫠
Yugoslavia1
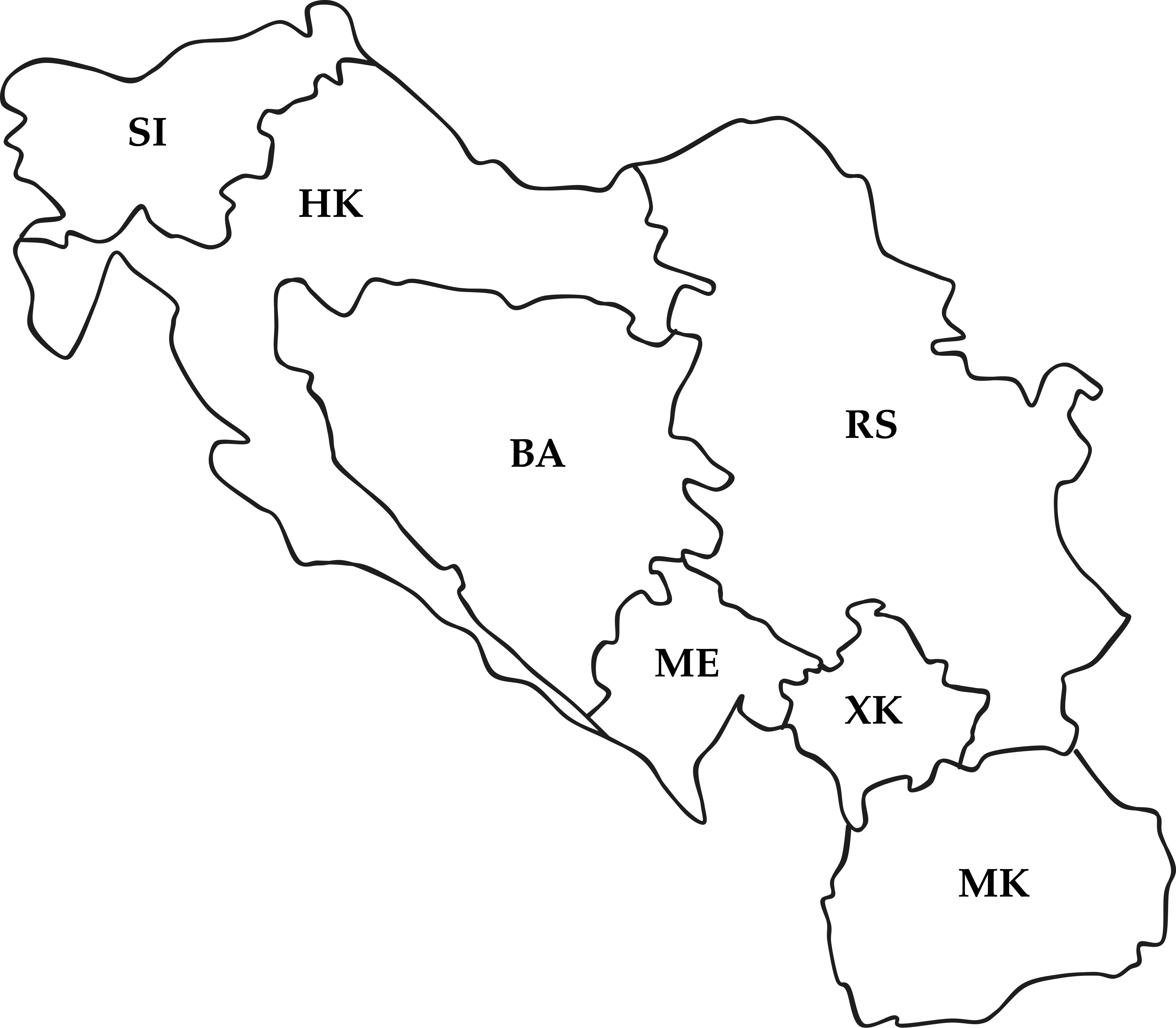
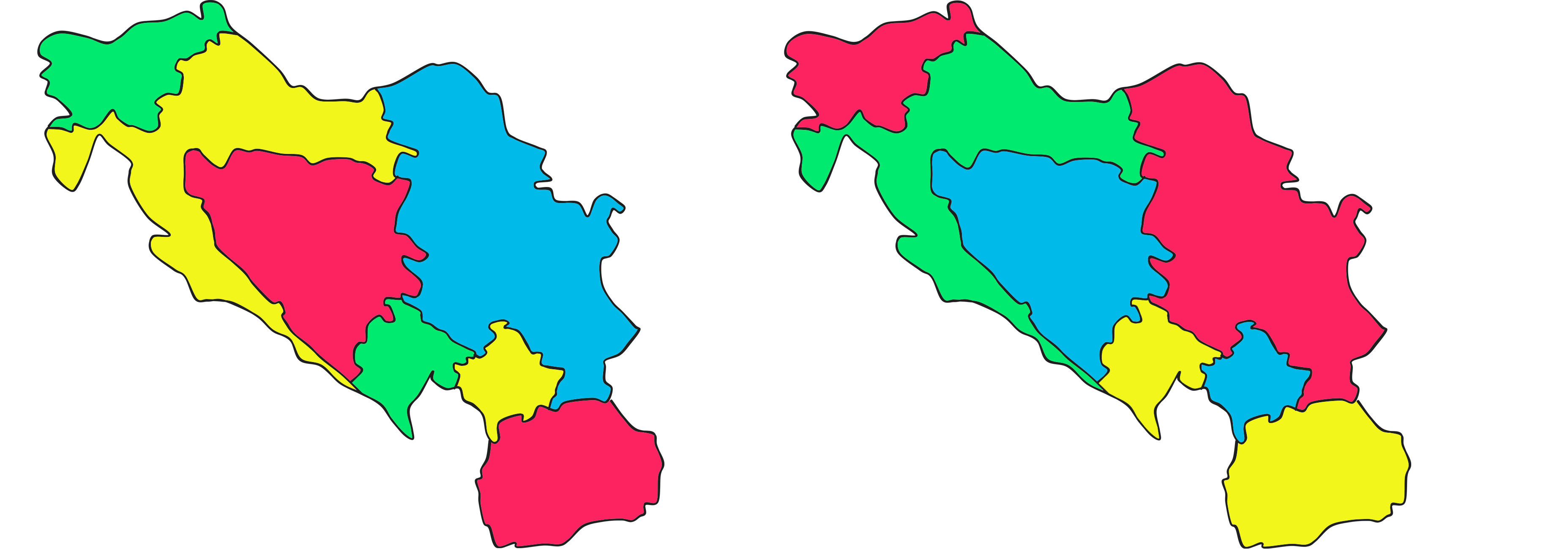
Four-Colorings
Two possibilities:
Formulate as CSP?
Graph Representation I
Constraint graph: edges are constraints
Graph Representation II
Constraint hypergraph: constraints are nodes
How To Solve It
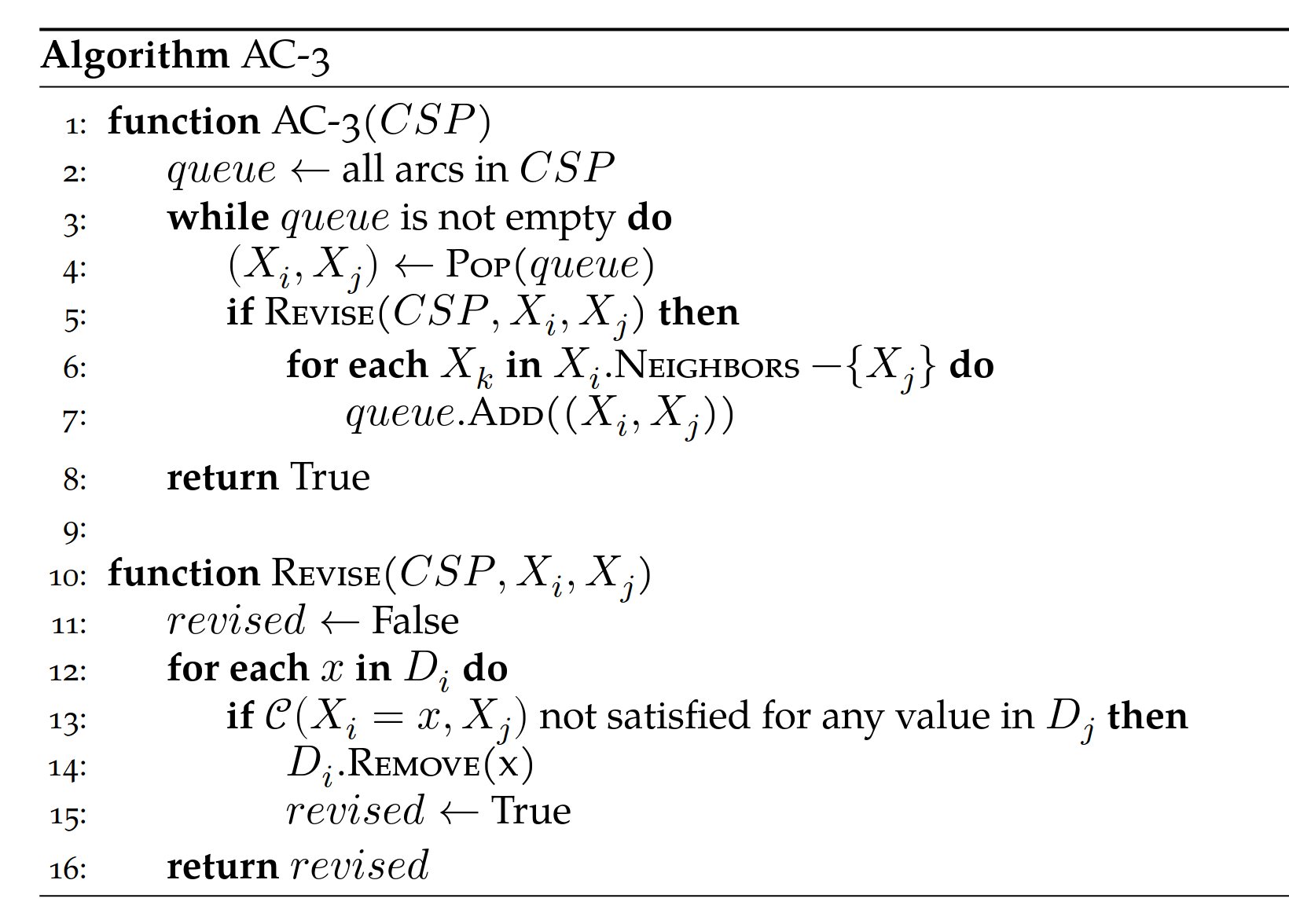
AC-3
How To Solve It (Again)
Yugoslav Arc Consistency
Cutset Example
Continuous Domains
- Linear:
\[\begin{aligned} \max_{x} \quad & \boldsymbol{c}^T\boldsymbol{x}\\ \textrm{s.t.} \quad & A\boldsymbol{x} \leq \boldsymbol{b}\\ &\boldsymbol{x} \geq 0 \\ \end{aligned}\]
- Convex
\[\begin{aligned} \min_{x} \quad & f(\boldsymbol{x})\\ \textrm{s.t.} \quad & g_i(\boldsymbol{x}) \leq 0\\ & h_i(\boldsymbol{x}) = 0 \\ \end{aligned}\]