[0.5 0.4 0.1]Markov Decision Processes
CSCI 4511/6511
Joe Goldfrank
Announcements
- Homework Four: 29 Mar
- Project Scope: 5 Apr
- Homework 3: Resubmission
- +80 pts from original
- Can’t exceed 100
- Due 10 Apr (hard stop)
Markov Chains
Markov property:
\(P(X_{t} | X_{t-1},X_{t-2},...,X_{0}) = P(X_{t} | X_{t-1})\)
“The future only depends on the past through the present.”
- State \(X_{t-1}\) captures “all” information about past
- No information in \(X_{t-2}\) (or other past states) influences \(X_{t}\)
What Even Is State?
Random Walk:
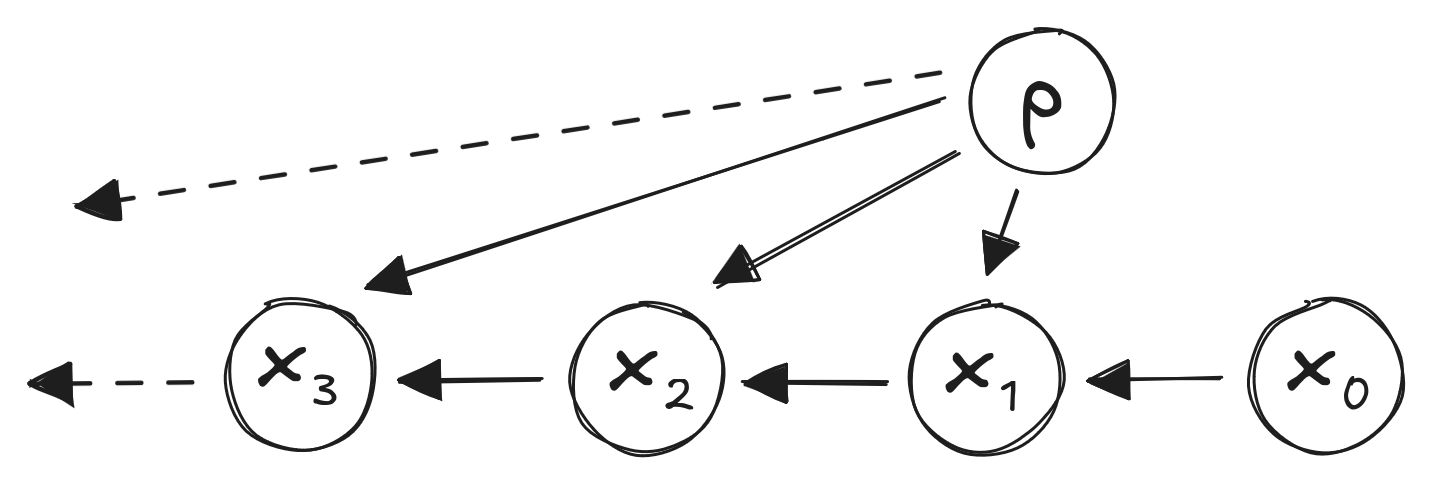
- Start with some amount of money, flip coin:
- Heads: Gain $1
- Tails: Lose $1
- \(x_t\): Money
- \(p\): Coin flip probability
What Even Is State?
The Same Random Walk:

- \(x_t\): tuple (Money, coin flip probability)
- Markov Property satisfied
State Transitions
Stochastic matrix \(P\)
\[ P = \begin{bmatrix} P_{1,1} & \dots & P_{1,n}\\ \vdots & \ddots & \\ P_{n, 1} & & P_{n,n} \end{bmatrix} \]
- All rows sum to 1
- Discrete state spaces implied
State Transitions
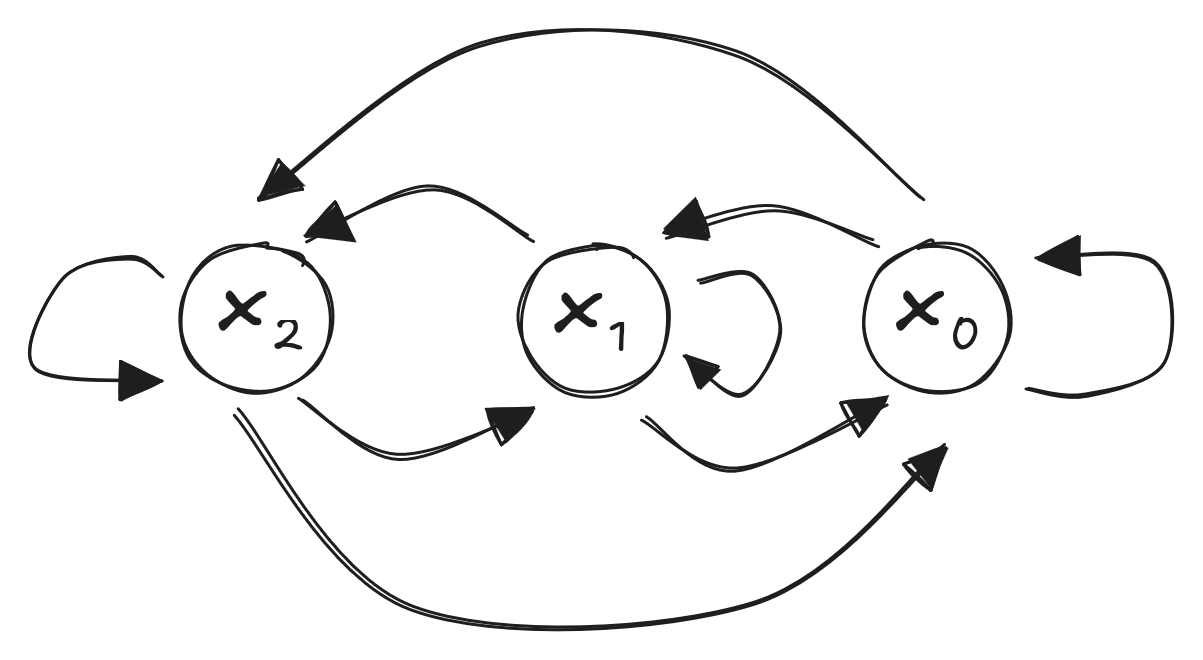
State Transitions
- State: Full state \(x\) is row vector
- Each entry represents one state
- Example: three states representing weather
- Clear, Clouds, Rain
- \(x_t = \begin{bmatrix}1 & 0 & 0\end{bmatrix} \rightarrow\) Clear
- \(x_t = \begin{bmatrix}0 & 1 & 0\end{bmatrix} \rightarrow\) Clouds
- \(x_t = \begin{bmatrix}0 & 0 & 1\end{bmatrix} \rightarrow\) Rain
State Transitions
\(x_{t+1} = x_t P\)
\(x_0 = \begin{bmatrix}1 & 0 & 0\end{bmatrix}\) and \(P = \begin{bmatrix} 0.5 & 0.4 & 0.1 \\ 0.3 & 0.4 & 0.3 \\ 0.1 & 0.7 & 0.2 \end{bmatrix}\)
\(x_{1} = \begin{bmatrix}1 & 0 & 0\end{bmatrix} \begin{bmatrix} 0.5 & 0.4 & 0.1 \\ 0.3 & 0.4 & 0.3 \\ 0.1 & 0.7 & 0.2 \end{bmatrix} = \begin{bmatrix}0.5 & 0.4 & 0.1\end{bmatrix}\)
State Transitions
\(x_{1} = \begin{bmatrix}0.5 & 0.4 & 0.1\end{bmatrix}\)
Probabilities of being in each state: Clear, Clouds, Rain
\(x_{2} = \begin{bmatrix}0.5 & 0.4 & 0.1\end{bmatrix} \begin{bmatrix} 0.5 & 0.4 & 0.1 \\ 0.3 & 0.4 & 0.3 \\ 0.1 & 0.7 & 0.2 \end{bmatrix}\)
\(= \begin{bmatrix}0.38 & 0.43 & 0.35\end{bmatrix}\)
numpy
- Use the matrix multiplication operator:
@ - Altneratively:
numpy.matmul
Stationary Behavior
- “Long run” behavior of Markov chain
\(x_0 P^k\) for large \(k\)
- “Stationary state” \(\pi\) such that:
\(\pi = \pi P\)
- Row eigenvector for \(P\) for eigenvalue 1
- 😌
Stationary Behavior (numpy)
\(P^k\)
[0.32144092 0.46427961 0.21427948]
[0.32142527 0.46428717 0.21428756]Eigenvector
Absorbing States
- State that cannot be “escaped” from
- Example: gambling \(\rightarrow\) running out of money
\(P = \begin{bmatrix} 0.5 & 0.3 & 0.1 & 0.1 \\ 0.3 & 0.4 & 0.3 & 0 \\ 0.1 & 0.6 & 0.2 & 0.1 \\ 0 & 0 & 0 & 1 \end{bmatrix}\)
- Non-absorbing states: “transient” states
Communication
- Sub-classes
\(P = \begin{bmatrix} 0.5 & 0.3 & 0.2 & 0 & 0 \\ 0.3 & 0.4 & 0.3 & 0 & 0\\ 0.1 & 0.6 & 0.2 & 0.1 & 0 \\ 0 & 0 & 0 & 0.6 & 0.4 \\ 0 & 0 & 0 & 0.3 & 0.7 \end{bmatrix}\)
- Examples?
Non-Discrete Cases
Gaussian random walk:
\(x_{t+1} = x_t + \mathcal{N}(0,1)\)
- Markov property?
- “Long-run” behavior?
\(\mathcal{N}(\mu_a,\sigma_a^2) + \mathcal{N}(\mu_b,\sigma_b^2) = \mathcal{N}(\mu_a + \mu_b,\sigma_a^2 + \sigma_b^2)\)
😌
Outcomes1
- Each state associated with some “reward”
- Spend one time step in state \(\rightarrow\) reward collected
- Future rewards discounted
Discounting:
- \(\$1.00\) today bears interest \(\rightarrow\) \(\$1.05\) next year
- \(\$1.00\) next year is worth \(\frac{1}{1.05} \approx \$0.95\) today
- Rationale: resources today are productive
- Build things for the future
Markov Reward Process
- Reward function \(R_s = E[R_{t+1} | S_t = s]\):
- Reward for being in state \(s\)
- Discount factor \(\gamma \in [0, 1]\)

\(U_t = \sum_k \gamma^k R_{t+k+1}\)
Example
States: Sales Volume
\(P = \begin{matrix} Low \\ Medium \\ High \end{matrix} \begin{bmatrix} 0.4 & 0.5 & 0.1 \\ 0.2 & 0.6 & 0.2 \\ 0.8 & 0.2 & 0 \end{bmatrix}\)
Rewards:
\(R = \begin{bmatrix} 1 \\ 2.5 \\ 5 \end{bmatrix} \quad \quad \gamma = 0.85\)
Example
Reward for being in state \(x_0 = \begin{bmatrix}0 & 1 & 0\end{bmatrix}\):
\(R_1 = x_0 R = \begin{bmatrix}0 & 1 & 0\end{bmatrix}\begin{bmatrix} 1 \\ 2.5 \\ 5 \end{bmatrix} = 2.5\)
State transition:
\(x_1 = \begin{bmatrix}0 & 1 & 0\end{bmatrix} \begin{bmatrix} 0.4 & 0.5 & 0.1 \\ 0.2 & 0.6 & 0.2 \\ 0.8 & 0.2 & 0 \end{bmatrix} = \begin{bmatrix}0.2 & 0.6 & 0.2\end{bmatrix}\)
\(R_2 = x_1 R = \begin{bmatrix}0.2 & 0.6 & 0.2\end{bmatrix}\begin{bmatrix} 1 \\ 2.5 \\ 5 \end{bmatrix} = 2.7\)
Discounted reward: \(2.7 \cdot \gamma^1 = 2.7\cdot0.85 = 2.295\)
Value Function
\(U_t = \sum_k \gamma^k R_{t+k+1}\)
\(U(s_t) = E\left[R_{t+1} + \gamma U(s_{t+1})\right]\)
\(U(s) = R_{s} + \gamma \sum\limits_{s' \in S} P_{s,s'} U(s')\)
\(U = R + \gamma P U\)
\((I-\gamma P) U = R\)
\(U = (I-\gamma P)^{-1} R\)
Decisions1
- Markov Decision Process:
- Actions \(a_t\)
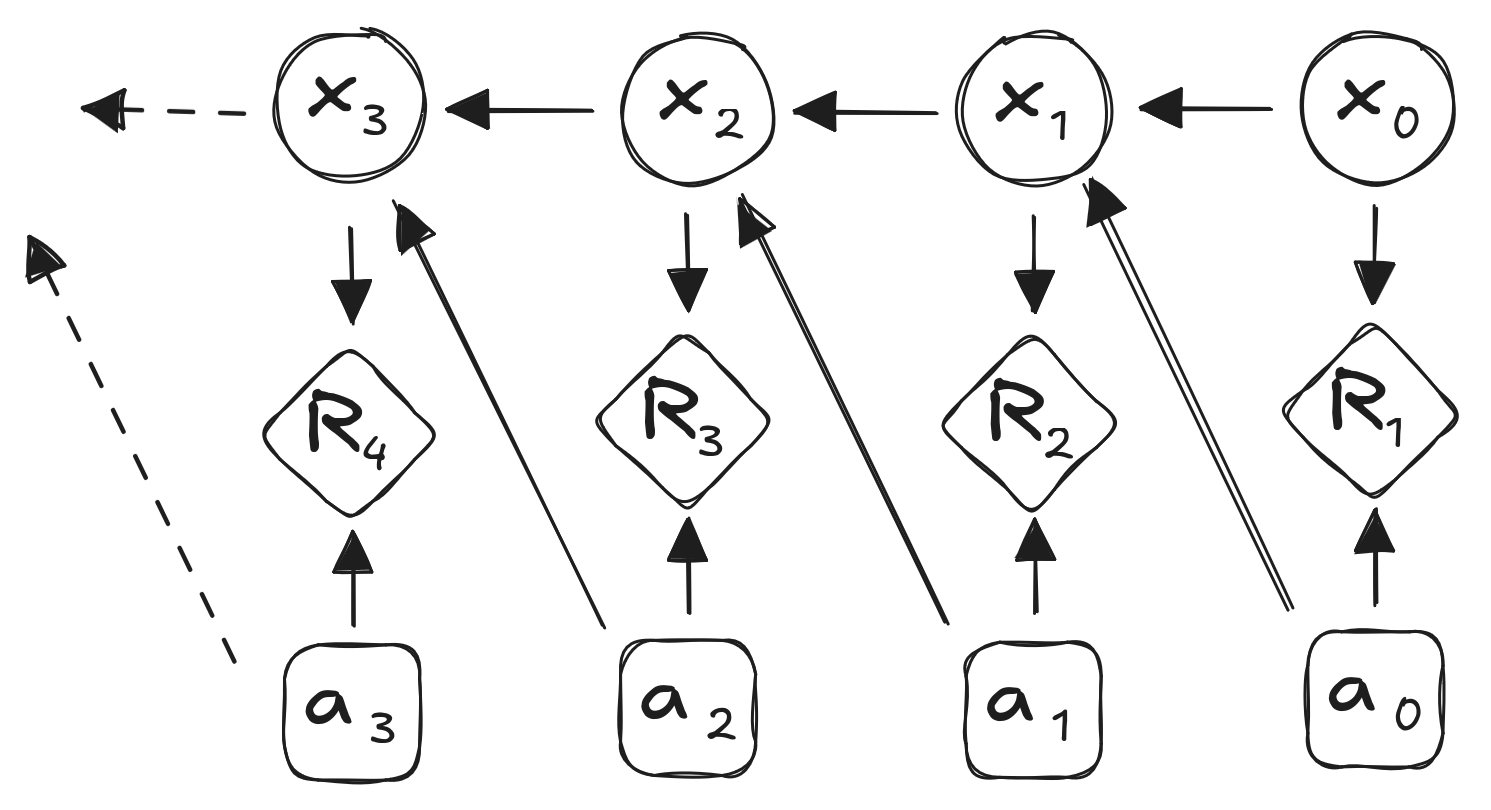
The Markov Decision Process
- Transition probabilities depend on actions
Markov Process:
\(s_{t+1} = s_t P\)
Markov Decision Process (MDP):
\(s_{t+1} = s_t P^a\)
Rewards: \(R^a\) with discount factor \(\gamma\)
Mathematical Notation 😔
- \(P^a\) indicates transition matrix \(P\) associated with action \(a\)
- Does not mean \(P\) raised to some power
- We’ve used \(P^k\) for \(P\) raised to the power of \(k\)
- \(P_{i,j}\) indicates transition probability from state \(s_i\) to state \(s_j\)
- \(P_{s,s'}\) indicates transition probability from state \(s\) to state \(s'\)
Alternatively:
- \(T(s' | s, a)\) – transition matrix from \(s\) to \(s'\) given action \(a\)
MDP Example
- States: Sales Volume
- Actions: \(a_0, a_1\)
\(P^0 = \begin{matrix} Low \\ Medium \\ High \end{matrix} \begin{bmatrix} 0.4 & 0.5 & 0.1 \\ 0.2 & 0.6 & 0.2 \\ 0.8 & 0.2 & 0 \end{bmatrix} \quad P^1 = \begin{matrix} Low \\ Medium \\ High \end{matrix} \begin{bmatrix} 0.2 & 0.6 & 0.2 \\ 0.1 & 0.6 & 0.3 \\ 0.5 & 0.4 & 0.1 \end{bmatrix}\)
- Rewards: product of state and action
\(R^0 = \begin{bmatrix} 1 \\ 2.5 \\ 5 \end{bmatrix} R^1 = \begin{bmatrix} 0 \\ 1.5 \\ 4 \end{bmatrix} \quad \quad \gamma = 0.85\)
- What does this example model?
MDP - Policies
- Agent function
- Actions conditioned on states
\(\pi(s) = P[A_t = a | s_t = s]\)
- Can be stochastic
- Usually deterministic
- Usually stationary
MDP - Policies
State value function \(U^\pi\):1
\(U^\pi(s) = E_\pi[U_t | S_t = s]\)
State-action value function \(Q^\pi\):2
\(Q^\pi(s,a) = E_\pi[U_t | S_t = s, A_t = a]\)
Notation: \(E_\pi\) indicates expected value under policy \(\pi\)
Bellman Expectation
Value function:
\(U^\pi(s) = E_\pi[R_{t+1} + \gamma U^\pi (S_{t+1}) | S_t = s]\)
Action-value fuction:
\(Q^\pi(s, a) = E_\pi[R_{t+1} + \gamma Q^\pi(S_{t+1}, A_{t+1}) | S_t = s, A_t =a]\)
Bellman Expectation
Value function:
\(U^\pi(s) = E_\pi[R_{t+1} + \gamma U^\pi (S_{t+1}) | S_t = s]\)
Action-value fuction:
\(Q^\pi(s, a) = E_\pi[R_{t+1} + \gamma Q^\pi(S_{t+1}, A_{t+1}) | S_t = s, A_t =a]\)
Policy Evaluation
- How good is some policy \(\pi\)?
\(U^\pi_1(s) = R(s, \pi(s))\)
\(U^\pi_{k+1}(s) = R(s, \pi(s)) + \gamma \sum \limits_{s^{'}} T(s' | s, \pi(s)) U_k^\pi(s')\)
- Exact solution (matrix form):
\(U^\pi = R^\pi + \gamma T^\pi U^\pi\)
\(U^\pi = (I-\gamma T^\pi)^{-1}R^\pi\)
Optimal Policies 😌
- There will always be an optimal policy
- For all MDPs!
- Policy ordering:
- \(\pi \geq \pi' \;\) if \(\; U^\pi(s) \geq U^{\pi'}(s), \; \forall s\)
- Optimal policy:
- \(\pi* \geq \pi, \; \forall \pi\)
- \(U^{\pi*}(s) = U^*(s)\) and \(Q^{\pi*}(s) = Q^*(s)\)
Optimal Policies
- Optimal policy \(\pi^*\) maximizes expected utility from state \(s\):
- \(\pi^*(s) = \mathop{\operatorname{arg\,max}}\limits_a U^*(s)\)
- Value function:
- \(U^*(s) = \max_a U^*(s)\)
Optimal Policies
- Action-value function:
- \(Q(s, a) = R(s, a) + \gamma \sum \limits_{s'} T(s' | s, a) U(s')\)
- Greedy policy given some \(U(s)\):
- \(\pi(s) = \mathop{\operatorname{arg\,max}}\limits_a Q(s,a)\)
Partial Bellman Equation
Decision: \[U^*(s) = \max_a Q^*(s,a)\]
Partial Bellman Equation
Stochastic: \[Q^*(s, a) = R(s, a) + \gamma \sum \limits_{s'} T(s' | s, a) U^*(s')\]
Bellman Equation
\[U^*(s) = \max_a R(s, a) + \gamma \sum \limits_{s'} T(s' | s, a) U^*(s')\]
Bellman Equation
\[Q^*(s, a) = R(s, a) + \gamma \sum \limits_{s'} T(s' | s, a) \max_a Q^*(s', a')\]
How To Solve It
- No closed-form solution
- Optimal case differs from policy evaluation
Iterative Solutions:
- Value Iteration
- Policy Iteration
Reinforcement Learning
Dynamic Programming
- Assumes full knowledge of MDP
- Decompose problem into subproblems
- Subproblems recur
- Bellman Equation: recursive decomposition
- Value function caches solutions
Iterative Policy Evaluation
Iteratively, for each algorithm step \(k\):
\(U_{k+1}(s) = \sum \limits_{a \in A}\left(R(s, a) + \gamma \sum \limits_{s'\in S} T(s' | s, a) U_k(s') \right)\)
- “Bellman Backup”
Policy Iteration
Algorithm:
- Until convergence:
- Evaluate policy
- Select new policy according to greedy strategy
Greedy strategy:
\[\pi'(s) = \mathop{\operatorname{arg\,max}}\limits_a Q(s,a)\]
Unpacking the Notation
\[\pi(s) = \mathop{\operatorname{arg\,max}}\limits_a Q(s,a)\]
- \(\pi'(s)\)
- New policy \(\pi'\)
- New policy is a function of state: \(\pi'(s)\)
- \(Q(s,a)\)
- Value of state, action pair\((s, a)\)
- Policy as function of state \(s\)
- Looks over all actions at each state
- Chooses action with highest value (argmax)
Policy Iteration
Previous step:
- \(Q^\pi(s,\pi(s))\)
Current step:
- \(Q^\pi(s, \pi' (s)) \gets \max \limits_a Q^\pi(s,a) \geq Q^\pi(s, \pi(s))\)
- \(= U^\pi(s)\)
Policy Iteration
Convergence:
- \(Q^\pi(s, \pi' (s)) = \max \limits_a Q^\pi(s,a) = Q^\pi(s, \pi(s))\)
- \(= U^\pi(s)\)
Convergence
- Does our policy need to converge to \(U^\pi\) ?
- \(U^\pi\) represents value
- We care about policy1
Modified Policy Iteration:
- \(\epsilon\)-convergence
- \(k\)-iteration policy evaluation
- \(k = 1\): Value Iteration
Value Iteration
Optimality:
- Given state \(s\), states \(s'\) reachable
- Optimal policy \(\pi(s)\) achieves optimal value:
- \(U^\pi(s') = U^*(s')\)
Assume:
- We have \(U^*(s')\)
- We want \(U^*(s)\)
Value Iteration
One-step lookahead:
\[U^*(s) \gets \max \limits_a \left( R(s,a) + \gamma \sum \limits_s' T(s'|s, a) U^*(s') \right)\]
- Apply updates iteratively
- Use current \(U(s')\) as “approximation” for \(U^*(s')\)
- That’s the algorithm.
- Extract policy from values after completion.
Value Iteration Illustrated
\[U_{k+1}(s) \gets \max \limits_a \left( R(s,a) + \gamma \sum \limits_s' T(s'|s, a) U_k(s') \right)\]
Synchronous Value Iteration…
\[U_{k+1}(s) \gets \max \limits_a \left( R(s,a) + \gamma \sum \limits_s' T(s'|s, a) U_k(s') \right)\]
- \(U_k(s)\) held in memory until \(U_{k+1}(s)\) computed
- Effectively requires two copies of \(U\)
Asynchronous Value Iteration
- Updating \(U(s)\) for one state at a time:
\[U(s) \gets \max \limits_a \left( R(s,a) + \gamma \sum \limits_s' T(s'|s, a) U(s) \right)\]
- Ordering of states can vary
- Converges if all states are updated
- …and if algorithm runs infinitely
References
Richard S. Sutton and Andrew G. Barto. Reinforcement Learning: An Introduction. 2nd Edition, 2018.
Mykal Kochenderfer, Tim Wheeler, and Kyle Wray. Algorithms for Decision Making. 1st Edition, 2022.
John G. Kemeny and J. Laurie Snell, Finite Markov Chains. 1st Edition, 1960.
Stanford CS234 (Emma Brunskill)
UCL Reinforcement Learning (David Silver)
Stanford CS228 (Mykal Kochenderfer)