Constraint Satisfaction
CSCI 4511/6511
Announcements
- Homework 3 is released
- Working with one partner is optionally permitted
- 20 point bonus if turned in by 4 Mar
- Due 15 Mar
- Midterm Exam on 6 Mar
- Project spec released
Midterm Exam on 6 Mar
- In lecture
- DUQ 359, 12:45 PM
- 100 minutes
- Open note:
- Ten sides1 of handwritten notes permitted
Games
Minimax
- Initial state \(s_0\)
- Actions(\(s\)) and To-move(\(s\))
- Result(\(s, a\))
- Is-Terminal(\(s\))
- Utility(\(s, p\))
Minimax
Games of Luck
- Real-world problems are rarely deterministic
- Non-deterministic state evolution:
- Roll a die to determine next position
- Toss a coin to determine who picks candy first
- Precise trajectory of kicked football1
- Others?
Solving Non-Deterministic Games
Previously: Max and Min alternate turns
Now:
- Max
- Chance
- Min
- Chance
😣
We Played Another Game
- Place 11 pieces of candy between you
- Alternating turns:
- Choose to take one or two pieces
- Except:
- After choosing, flip two coins, record total number of heads1
- If total is divisible by 3, take one less piece than you chose
- If total is divisible by 5, take one more piece than you chose
- If total divisible by 15, take no candy
- Last person to take a piece wins all of the candy
Expectiminimax
- “Expected value” of next position

- How does this impact branching factor of the search?
🫠
Filled With Uncertainty
What is to be done?
- Pruning is still possible
- How?
- Heuristic evaluation functions
- Choose carefully!
Non-Optimal Adversaries
- Is deterministic “best” behavior optimal?
- Are all adversaries rational?
- Expectimax
CSPs
Factored Representation
- Encode relationships between variables and states
- Solve problems with general search algorithms
- Heuristics do not require expert knowledge of problem
- Encoding problem requires expert knowledge of problem1
Why?
Constraint Satisfaction
- Express problem in terms of state variables
- Constrain state variables
- Begin with all variables unassigned
- Progressively assign values to variables
- Assignment of values to state variables that “works:” solution
More Formally
- State variables: \(X_1, X_2, ... , X_n\)
- State variable domains: \(D_1, D_2, ..., D_n\)
- The domain specifies which values are permitted for the state variable
- Domain: set of allowable variables (or permissible range for continuous variables)1
- Some constraints \(C_1, C_2, ..., C_m\) restrict allowable values
Constraint Types
- Unary: restrict single variable
- Can be rolled into domain
- Why even have them?
- Binary: restricts two variables
- Global: restrict “all” variables
Constraint Examples
- \(X_1\) and \(X_2\) both have real domains, i.e. \(X_1, X_2 \in \mathbb{R}\)
- A constraint could be \(X_1 < X_2\)
- \(X_1\) could have domain \(\{\text{red}, \text{green}, \text{blue}\}\) and \(X_2\) could have domain \(\{\text{green}, \text{blue}, \text{orange}\}\)
- A constraint could be \(X_1 \neq X_2\)
- \(X_1, X_2, ..., X_{100} \in \mathbb{R}\)
- Constraint: exactly four of \(X_i\) equal 12
- Rewrite as binary constraint?
Assignments
- Assignments must be to values in each variable’s domain
- Assignment violates constraints?
- Consistency
- All variables assigned?
- Complete
Yugoslavia1
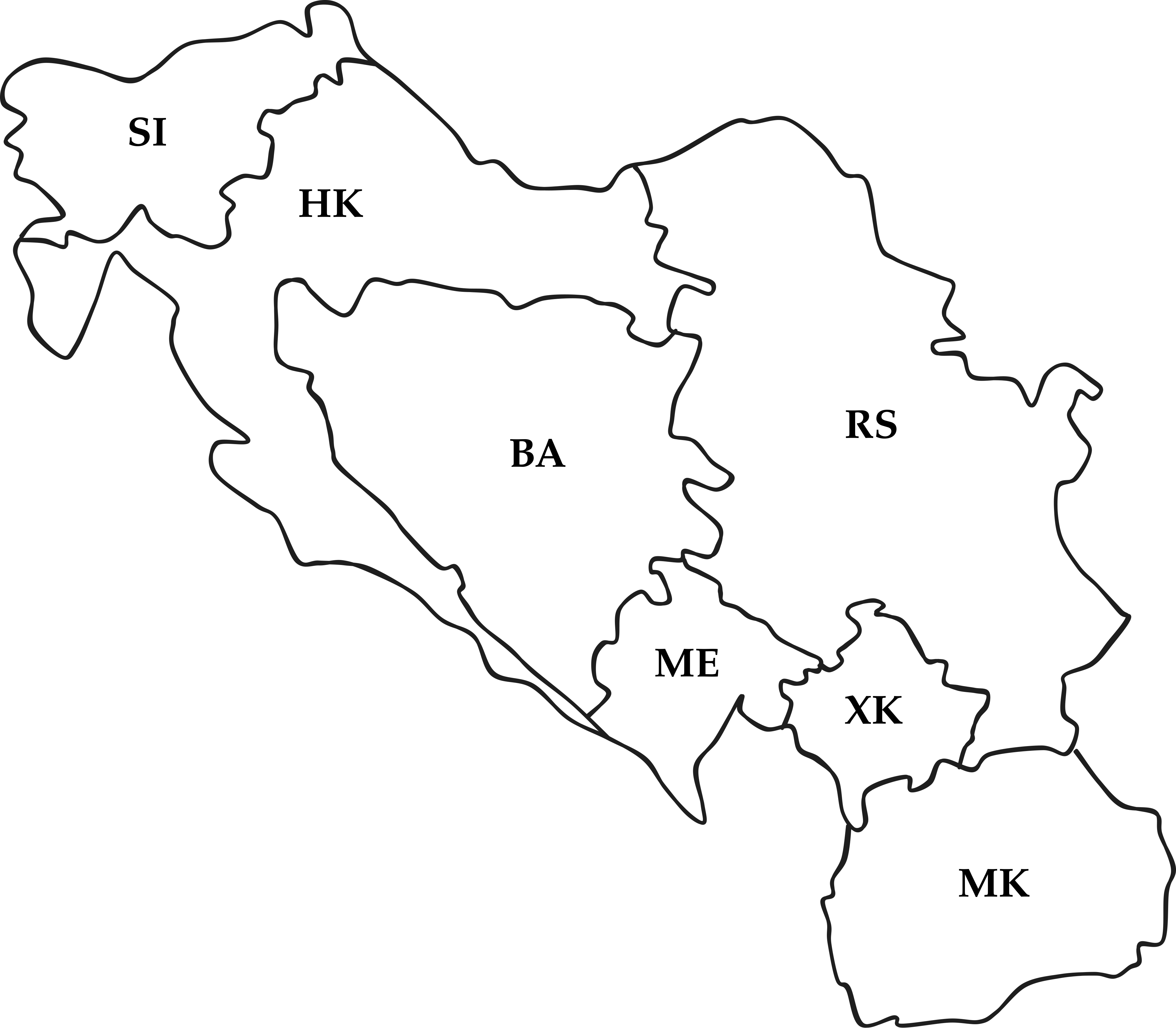
Four-Colorings
Two possibilities:
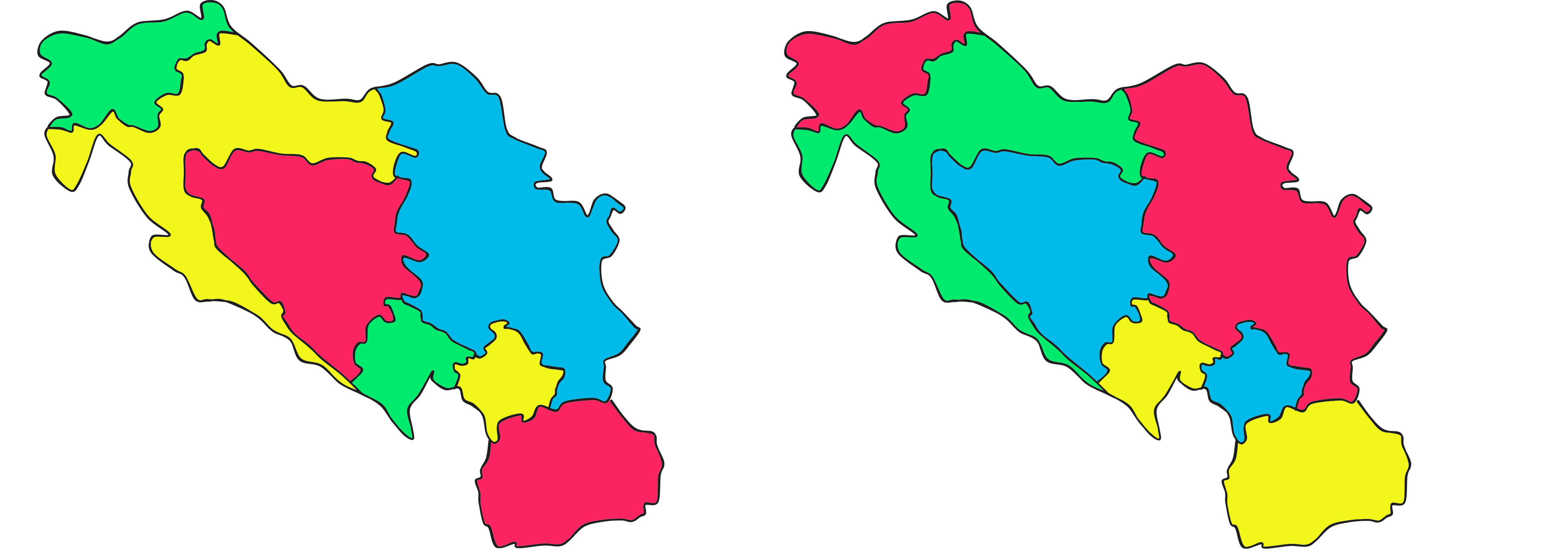
Formulate as CSP?
Graph Representations
- Constraint graph:
- Nodes are variables
- Edges are constraints
- Constraint hypergraph:
- Variables are nodes
- Constraints are nodes
- Edges show relationship
Why have two different representations?
Graph Representation I
Constraint graph: edges are constraints
Graph Representation II
Constraint hypergraph: constraints are nodes
How To Solve It
- We can search!
- …the space of consistent assignments
- Complexity \(O(d^n)\)
- Domain size \(d\), number of nodes \(n\)
- Tree search for node assignment
- Inference to reduce domain size
- Recursive search
How To Solve It
What Even Is Inference
- Constraints on one variable restrict others:
- \(X_1 \in \{A, B, C, D\}\) and \(X_2 \in \{A\}\)
- \(X_1 \neq X_2\)
- Inference: \(X_1 \in \{B, C, D\}\)
- If an unassigned variable has no domain…
- Failure
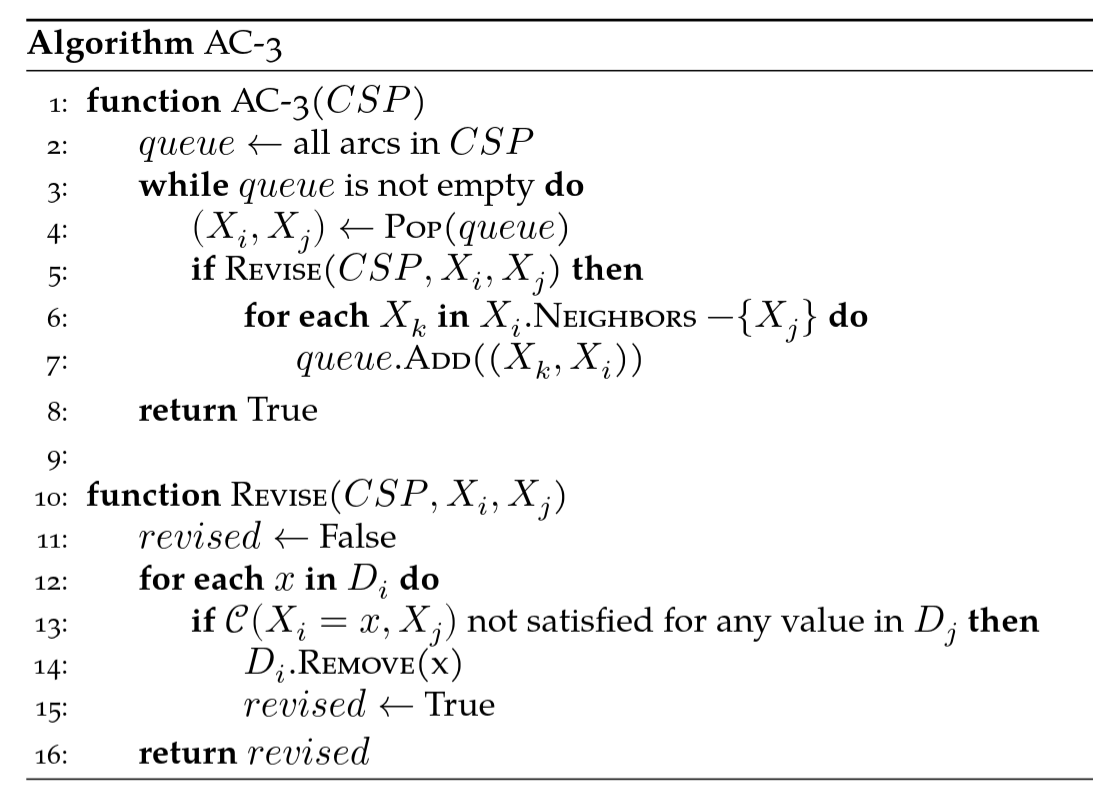
Inference
- Arc consistency
- Reduce domains for pairs of variables
- Path consistency
- Assignment to two variables
- Reduce domain of third variable
AC-3
How To Solve It (Again)
Backtracking search:
- Similar to DFS
- Variables are ordered
- Why?
- Constraints checked each step
- Constraints optionally propagated
How To Solve It (Again)
Yugoslav Arc Consistency
Ordering
- Select-Unassigned-Variable(\(CSP, assignment\))
- Choose most-constrained variable1
- Order-Domain-Variables(\(CSP, var, assignment\))
- Least-constraining value
- Why?
Restructuring
Tree-structured CSPs:
Linear time solution
Directional arc consistency: \(X_i \rightarrow X_{i+1}\)
Cutsets
Sub-problems
(Heuristic) Local Search
- Hill climbing
- Random restarts
- Simulated annealing
- Fast?
- Complete?
- Optimal?
Continuous Domains
- Linear:
\[\begin{aligned} \max_{x} \quad & \boldsymbol{c}^T\boldsymbol{x}\\ \textrm{s.t.} \quad & A\boldsymbol{x} \leq \boldsymbol{b}\\ &\boldsymbol{x} \geq 0 \\ \end{aligned}\]
- Convex
\[\begin{aligned} \min_{x} \quad & f(\boldsymbol{x})\\ \textrm{s.t.} \quad & g_i(\boldsymbol{x}) \leq 0\\ & h_i(\boldsymbol{x}) = 0 \\ \end{aligned}\]
Is This Even Relevant in 2026?
- Absolutely yes.
- LLMs are bad at CSPs
- CSPs are common in the real world
- Scheduling
- Optimization
- Dependency solvers
Probability
Randomness and Uncertainty
- We don’t know things about future events
- Someone else might know
- Example: expectimax!
- Ghost could behave randomly
- Ghost could behave according to some plan
- We model behavior as random
The Random Variable
- Uncertain future event: random variable
- Probability:
\[P(x) = \lim_{n \to \infty} \frac{n_x}{n}\]
- Probabilities constrained \(0 \leq P(x) \leq 1\) for any \(x\)
The Random Variable
- In ensemble of events, what fraction represent event \(x\) ?
- What’s troubling about this?
- How do we quantify probability based on observations?
- How do we quantify probability without direct observations?
Plausibility of Statements
- “A is more plausible than B”
- \(P(A) > P(B)\)
- “A is as plausible as B”
- \(P(A) = P(B)\)
- “A is impossible”
- \(P(A) = 0\)
- “A is certain”
- \(P(A) = 1\)
Probability Distribution
- Enumerate possible outcomes1
- Assign probabilities to outcomes
- Distribution: ensemble of outcomes mapped to probabilities
- Works for discrete and continuous cases
Combinatorics
- Enumerating outcomes is a counting problem
- We know how to solve counting problems
- Permutations:
- Ordering \(n\) items: \(n!\)
- Ordering \(n\) items, \(k\) of which are alike: \(\frac{n!}{k!}\)
- … \(k_1\), \(k_2\) of which are alike: \(\frac{n!}{k_1!k_2!}\)
I Am Extremely Sorry
…if you thought this course was going to be about LLMs
Combinatorics
- How many possible outcomes are there?
- How many possible outcomes are there of interest?
- Assume all outcomes have equal probability
- Or don’t
- Divide
- Weight if necessary
Choice
- \(n\) events
- \(k\) are of interest
- \(n-k\) are not of interest
Possible combinations:
\[\binom{n}{k} = \frac{n!}{k!(n-k)!}\]
Bernoulli Trials
- “Single event” that occurs with probability \(\theta\)
- \(P(E) = \theta\)
- \(P(\neg E) = 1 - \theta\)
- Alternate notations:1
- \(P(E^C) = 1 - \theta\)
- \(P(\bar{E}) = 1 - \theta\)
- Examples?
Math Notation
- \(P(E)\)
- Probability of some event \(E\) occuring
- \(P\{X=a\}\)
- Probability of random variable \(X\) taking value \(a\)
- \(p(a)\)
- Probability of random variable taking value \(a\)
Bernoulli Random Variable
- Bernoulli trial:
- Variable, takes one of two values
- Coin toss: \(H\) or \(T\)
- \(P\{X = H\} = \theta\)
- \(P\{X = T\} = 1 - \theta\)
Expected Value
- Variable’s values can be numeric values:
- Coin toss \(H = 8\) and \(T2\)
- \(P\{X = 8\} = \theta\)
- \(P\{X = 2\} = 1 - \theta\)
- Expected value:
- \(E[X] = H \cdot \theta + T \cdot (1-\theta)\)
- \(E[X] = 8 \cdot \theta + 2 \cdot (1-\theta)\)
Expected Value
Of a variable: \[E[X] = \sum_{i=0}^n x_i \cdot p(x_i)\]
Of a function of a variable:
\[E[g(x)] = \sum_{i=0}^n g(x_i) \cdot p(x_i) \neq g(E[X])\]
Variance
- How much do values vary from the expected value?
\[\text{Var}(X) = E[(X - E[X])^2]\]
- \(E[X]\) represents mean, or \(\mu\)
- We’re really interested in \(E[|X-\mu|]\)
- Absolute values are mathematically troublesome
- Standard deviation: \(\sigma\) = \(\sqrt{\text{Var}}\)
Variance
\[\begin{align}\text{Var}(X) & = E[(E[X]-\mu)^2]\\ & = \sum_x (x-\mu)^2 p(x) \\ & = \sum_x (x^2 - 2 x \mu + \mu^2) p(x) \\ & = \sum_x x^2 p(x) - 2 \mu \sum_x x p(x) + \mu^2 \sum_x p(x) \\ & = E[X^2] - 2 \mu \mu + \mu^2 \\ & = E[X^2] - E[X]^2 \end{align}\]
How To Lie With Statistics

References
Stuart J. Russell and Peter Norvig. Artificial Intelligence: A Modern Approach. 4th Edition, 2020.
Mykal Kochenderfer, Tim Wheeler, and Kyle Wray. Algorithms for Decision Making. 1st Edition, 2022.
Stanford CS231
Stanford CS228
UC Berkeley CS188