Markov Decision Processes
This example shows a very simple application of the dynamic programing using three related algorithms: Synchronous Value Iteration, Policy Iteration, and Asynchronous Value Iteration.
We’ll solve a problem (determine an optimal policy) similar to the example in last week’s lecture.
Imports:
Problem Setup
Similar to last week’s lecture, but slightly more complicated: the problem consists of four states and three actions.
Each state represents a sales volume (low, med-low, med-high, and high), and each action represents how much is spent on advertising.
Note how when more is spent on advertising, the next state is generally more likely to be a higher sales volume.
\(P^0 = \begin{bmatrix}0.5 & 0.4 & 0.1 & 0 \\ 0.4 & 0.5 & 0.1 & 0 \\ 0.7 & 0.1 & 0.1 & 0.1 \\ 0.5 & 0.2 & 0.2 & 0.1 \end{bmatrix} \quad P^1 = \begin{bmatrix} 0.7 & 0.2 & 0.0 & 0.1 \\ 0.2 & 0.3 & 0.4 & 0.1 \\ 0.5 & 0.2 & 0.2 & 0.1 \\ 0.4 & 0.2 & 0.2 & 0.1 \end{bmatrix} \quad P^2 = \begin{bmatrix} 0.1 & 0.3 & 0.4 & 0.2 \\ 0.1 & 0.3 & 0.5 & 0.1 \\ 0.3 & 0.3 & 0.1 & 0.3 \\ 0.3 & 0.4 & 0.1 & 0.2 \end{bmatrix}\)
\(R^0 = \begin{bmatrix} 1 \\ 3 \\ 5 \\ 12 \end{bmatrix} \quad R^1 = \begin{bmatrix} 0 \\ 2 \\ 4 \\ 11 \end{bmatrix} \quad R^2 = \begin{bmatrix} -2 \\ 0 \\ 2 \\ 9 \end{bmatrix} \quad \gamma = 0.95\)
P0 = np.array([[0.5, 0.4, 0.1, 0],
[0.4, 0.5, 0.1, 0],
[0.7, 0.1, 0.1, 0.1],
[0.5, 0.2, 0.2, 0.1]
])
P1 = np.array([[0.7, 0.2, 0.0, 0.1],
[0.2, 0.3, 0.4, 0.1],
[0.5, 0.2, 0.2, 0.1],
[0.4, 0.2, 0.2, 0.2]
])
P2 = np.array([[0.1, 0.3, 0.4, 0.2],
[0.1, 0.3, 0.5, 0.1],
[0.3, 0.3, 0.1, 0.3],
[0.3, 0.4, 0.1, 0.2]
])
R0 = np.array([[1],[3], [5], [12]])
R1 = np.array([[0],[2], [4], [11]])
R2 = np.array([[-2],[0], [2], [9]])
states = [np.array([[1, 0, 0, 0]]),
np.array([[0, 1, 0, 0]]),
np.array([[0, 0, 1, 0]]),
np.array([[0, 0, 0, 1]])]
# transition and reward as 'function' of action
# represented as dicts
T = {0: P0, 1: P1, 2: P2}
R = {0: R0, 1: R1, 2: R2}
gamma = 0.95Policy Evaluation
Bellman backup for iterative policy evaluation:
\(U^\pi_{k+1}(s) = R(s, \pi(s)) + \gamma \sum \limits_{s^{'}} T(s' | s, \pi(s)) U_k^\pi(s')\)
Implemented below using functions for each transition. We could also use matrix multiplication, but the functions are easier to read and understand.
Policy Update
Given:
\(Q^*(s, a) = R(s, a) + \gamma \sum \limits_{s'} T(s' | s, a) U^*(s')\)
Again, implemented as a “function” rather than using matrix multiplication.
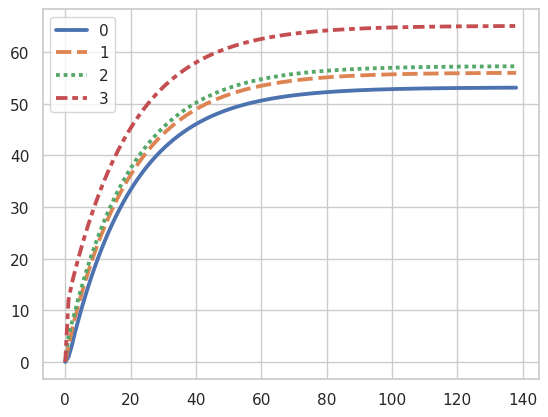
Synchronous Value Iteration
Initializing values and policy
Value iteration algorithm
We select policy according to \(U_{k+1}(s) = \max_a Q(s,a)\), then update \(U^\pi\) and iterate until convergence.
We run the algorithm until utility converges within some \(\epsilon\), chosen here as \(0.01\).
# iterate until values converge within 0.01
iterations = 0
while np.sum(U-old_U) > 0.01:
iterations += 1
Q = {}
new_pi = {}
# update policy based on U values
for s in range(len(states)): # iterate over all states
argmax_a = None
max_Q = -1*float('inf')
for a in range(len(T)): # iterate over possible actions
Q[(s,a)] = Q_sa(s, a, U, pi, gamma) # calculate Q-value
if Q[(s,a)] > max_Q: # get max, argmax
argmax_a = a
max_Q = Q[(s,a)]
new_pi[s] = argmax_a # update policy for state
pi = new_pi # update full policy
# update values
old_U = deepcopy(U) # keep old value to determine convergence
U = [bellman_backup(i, U, pi, gamma) for i in range(len(states))]
U = np.array(U)
# for plotting
for i, u in enumerate(U):
U_vals[i].append(u)
U_value_iteration = U
print("Policy:", pi)
print("Total Iterations:", iterations)Policy: {0: 2, 1: 1, 2: 0, 3: 1}
Total Iterations: 138Plotting Value Convergence
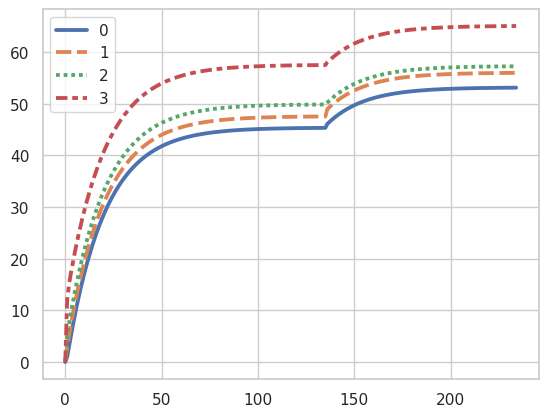
Policy Iteration
Initializing values and policy
print(pi)
iterations = 0
while pi != old_pi:
# determine U of policy
# iterate until values converge within 0.01
while np.sum(U-old_U) > 0.01:
iterations += 1
old_U = deepcopy(U)
U = np.array([bellman_backup(i, U, pi, gamma) for i in range(len(states))])
# for plotting
for i, u in enumerate(U):
U_vals[i].append(u)
# extract policy from U values
Q = {}
new_pi = {}
for s in range(len(states)): # iterate over all states
argmax_a = None
max_Q = -1*float('inf')
for a in range(len(T)): # iterate over possible actions
Q[(s,a)] = Q_sa(s, a, U, pi, gamma) # calculate Q-value
if Q[(s,a)] > max_Q: # get max, argmax
argmax_a = a
max_Q = Q[(s,a)]
new_pi[s] = argmax_a # update policy for state
old_pi = deepcopy(pi)
pi = new_pi # update full policy
U = [bellman_backup(i, U, pi, gamma) for i in range(len(states))]
U = np.array(U)
print("Policy:", pi)
print("Total Iterations:", iterations)
U_policy_iteration = U{0: 0, 1: 0, 2: 0, 3: 0}
Policy: {0: 2, 1: 1, 2: 0, 3: 1}
Total Iterations: 135
Policy: {0: 2, 1: 1, 2: 0, 3: 1}
Total Iterations: 234Plotting Value Convergence
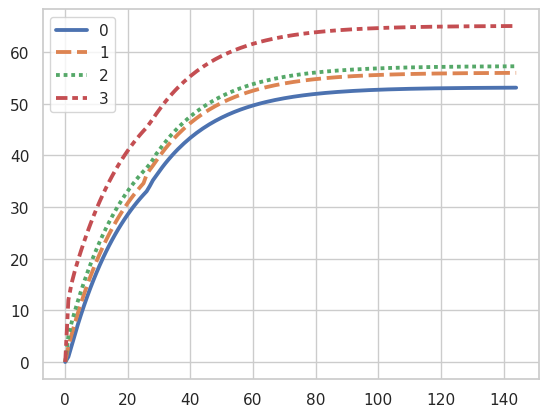
Asynchronous Value Iteration
# iterate until values converge within 0.01
iterations = 0
while np.sum(U-old_U) > 0.01:
iterations += 1
Q = {}
s = np.argmax(U-old_U) # choose s according to some rule
argmax_a = None
max_Q = -1*float('inf')
for a in range(len(T)): # iterate over possible actions
Q[(s,a)] = Q_sa(s, a, U, pi, gamma) # calculate Q-value
if Q[(s,a)] > max_Q: # get max, argmax
argmax_a = a
max_Q = Q[(s,a)]
pi[s] = argmax_a # update policy for state
# update values
old_U = deepcopy(U)
U = np.array([bellman_backup(i, U, pi, gamma) for i in range(len(states))])
# for plotting
for i, u in enumerate(U):
U_vals[i].append(u)
U_async_val_iteration = U
print("Policy:", pi)
print("Total Iterations:", iterations)Policy: {0: 2, 1: 1, 2: 0, 3: 1}
Total Iterations: 144Plotting Value Convergence
Code
These algorithms all ultimately solve for an optimal policy using the Bellman equation, so we find that the utilities and policies from each will be the same.